 DIY tutorials
DIY tutorials
Je eigen (goedkope) drone bouwen
Een drone bouwen is niet moeilijk
Drones zijn tegenwoordig in allerlei soorten en maten te koop. Met name de DJI drones hebben dusdanig veel geavanceerde features dat je voor een videodrone simpelweg niet verder moet zoeken. Deze drones bevatten allerlei hulpsystemen om objecten te ontwijken en gestabiliseerde beelden te schieten op hoge resoluties. Het zijn echter geen acrobaten. Vliegen met DJI drones kan op den duur zelfs een beetje saai worden. Zelf een drone bouwen heeft dus zo zijn voordelen, voornamelijk als je ermee wilt racen en/of stunten. Zelf een drone bouwen is ook niet extreem moeilijk. Dan kun je zelf bepalen welke eigenschappen hij krijgt, je krijgt verstand van de techniek en als er iets kapot gaat kun je zo weer een nieuw onderdeel bestellen.
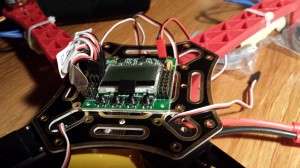
In dit bouwverslag wordt een DJI F450 frame gebruikt in combinatie met een Hobbyking kk2.0 flight controller. Het verslag vertelt je hoe je stap voor stap de drone in elkaar moet zetten en waarop je bij elke stap moet letten. Hopelijk kom je zo tot dezelfde conclusie als vele anderen: een drone is minder ingewikkeld dan hij eruit ziet!
Ook de prijs zal je waarschijnlijk meevallen, de drone zoals hier beschreven kost omgerekend zo’n €140 exclusief verzendkosten, zender & ontvanger en gereedschap. Dat is flink goedkoper dan de veel minder professionele AR Drone van €280 die onder andere bij de mediamarkt verkrijgbaar is en meer richting speelgoed neigt.
De drone zoals in dit artikel staat beschreven heeft al gevlogen. Ook is hij krachtig genoeg om een GoPro camera met FPV zender mee te kunnen nemen.
Wat zenders betreft: kijk eens naar een Spektrum (goed en betaalbaar) of Futaba (zeer goed en prijzig). Gebruik geen oude zenders met kristallen, maar zorg dat je gebruik maakt van het 2,4Ghz signaal. Er bestaat dan geen kans meer dat je drone opeens weg vliegt omdat iemand anders op hetzelfde signaal zit.
Benodigdheden
De volgende onderdelen heb je nodig om een complete drone te bouwen. Bij sommige onderdelen moet je op specifieke eigenschappen selecteren. Die staan schuingedrukt weergegeven.
- DJI F450 frame;
Zorg dat je het volledige frame koopt en niet alleen losse armen. Een landingsgestel is optioneel. - 4x Elektromotor (outrunner) (of: complete set met ESC’s);
De gelinkte set met ESC hierboven is erg goedkoop. Als je ze los wilt uitzoeken, lees dan verder. Normaal gesproken moet een outrunner de spanning van een 3S LiPo accu (=11,1V) aankunnen. Kijk vervolgens hoeveel stroom (Ampère [A]) de motor bij die spanning trekt, daarop wordt de ESC uitgekozen. Als je een losse elektromotor uitzoekt, zorg dan dat het een outrunner is en dat het maximale vermogen per motor tussen de 130W en 200W ligt. Qua KV kun je het beste tussen 950KV en 1400KV gaan zitten bij dit formaat frame en propellers. - 4x ESC (Electronic Speed Controller) (of: complete set met outrunners, zie hierboven);
Als je ESC’s los van de outrunners uitzoekt moet je zorgen dat de ESC de stroom die een outrunner nodig heeft bij een bepaalde spanning, kan leveren. Als dit niet wordt vermeld kun je het totale vermogen (Watt [W]) delen door de spanning van de accu. Het getal wat daar uitkomt is het minimale aantal stroom (Ampère [A]) die een ESC moet leveren. Voorbeeld: Een outrunner levert maximaal 450W vermogen. We gebruiken een 3S accu (=11,1V). 450/11,1=40,5. Een klein beetje afronden mag. We zoeken bij dit voorbeeld dus een 40A ESC. Tot slot kun je kijken welke aansluiting een ESC heeft en of dit overeenkomt met die aan de motor. Dat scheelt weer solderen. - Flight Controller;
Tegenwoordig misschien wel de lastigste keuze om te maken. Let op dat je geen micro flightcontroller kiest. Vroeger was de Hobbyking KK2.1 mijn aanbeveling. Die bestaat niet meer. Tegenwoordig bevelen veel mensen de Naze32 of de Skyline32 flight controllers aan. Die zijn niet zo duur en kunnen goed afgesteld worden. - 4x 10×4.5 propeller (excl. reserve) (of: complete set met outrunners en ESC’s, zie hierboven);
Kijk als eerst welke propeller-afmetingen bij de outrunner motors worden vermeld. Meestal wordt er een range vermeld. Kijk ook naar de as-maat van de motoren (en die van een “prop-adapter”). De propeller moet daar overheen passen. Eventuele extra ruimte is vaak met ringetjes op te vangen. Controleer vooraf natuurlijk ook even of de propellers niet te groot zijn voor het frame. Denk ook aan de bevestiging van de propeller aan de motoren. Vaak zit er al een “prop adapter” bij de motoren, soms ook niet. Die heb je nodig. - 3S 4000mAh LiPo accu;
De S staat voor het aantal cellen van 3,7V in de accu. In dit geval zijn dat er 3 en gaat het dus om 3*3,7=11,1V. Meer cellen is duurder, maar betekent ook een lagere stroom. Dat is gunstig voor de ESC’s en motoren. Zoek een capaciteit tussen de 3000mAh en 4000mAh. Dat zou zo’n 15 tot 20 minuten vliegtijd moeten opleveren. Meer mAh betekent een grotere accu en dus een zwaardere drone. Dat resulteert vrijwel nooit in langere vliegtijden. Overweeg daarom eerder om meerdere accu’s aan te schaffen. Kies een accu met een XT-60 male connector. - Ontvanger (compatibel met de zender);
Bij ontvangers en zenders zijn het aantal kanalen en het protocol belangrijk. Zoek een ontvanger uit die past bij het protocol die jouw zender heeft. Als je nog geen zender hebt raad ik aan om een DSM2 zender te kiezen. Die hebben een goede prijs/kwaliteit verhouding. Zorg voor minimaal 4 kanalen (genoeg voor 2 sticks met elk 2 richtingen), maar liefst ten minste 6 (voor als je later met knopjes extra functies wilt aanroepen). Voor de ontvanger geldt hetzelfde: minimaal 4ch en hetzelfde protocol als de zender. OrangeRX en Turnigy zijn goede merken. Spektrum is binnen het DSM2 protocol de meest high-end keuze. - 4x Servo kabeltjes (tussen ontvanger en FC);
Let op dat deze kabeltjes “male to male” zijn. Qua lengte is 15cm genoeg. - 12x female + 12x male bullet connectors (tussen ESC en motor);
Als de ESC en motor al overeenkomende aansluitingen hebben kun je dit overslaan. Zoek voor 3,5mm bullet connectors. Zorg dat je zowel male als female connectors hebt, die passen in elkaar. Je kunt het beste wat meer dan 12 sets bestellen als reserve. - XT60 female connector (tussen accu en frame);
Deze connector moet aan de connector van de accu passen. Controleer dus of de accu ook een XT60 connector heeft. Zo niet, wissel dan deze female connector om met een connector die wél op de accu past. Of andersom. - Foam tape;
- Tiewraps;
- Isolatietape/krimpkous;
- Velcro (klittenband);
- (Doorzichtige halve bol);
- (Stukjes schuim);
- (Papieren labeltjes).
Kijk altijd zelf ook even of het nóg goedkoper kan door mijn suggesties als voorbeeld te gebruiken. Aan de hand van de afbeeldingen in het bouwverslag kun je kijken of je de juiste onderdelen hebt gevonden. Dode links kun je ook aan mij rapporteren, dan pas ik de lijst aan.

Stap 1 – ESC’s aan het frame solderen
Soldeer de ESC’s aan het frame. Soldeer hierbij telkens het rode draad aan de + (plus), het zwarte draad aan de – (min). Vertin eerst het draad van de ESC en het koperen plaatje. Leg hiervoor de soldeerbout in het midden van het plaatje en voeg de tin tegen de soldeerboutpunt toe. Op deze manier stroomt het tin vanuit het midden richting de zijkanten van het koperen plaatje. Zorg voor een mooi bultje tin, de ESC moet goed vast komen te zitten. Eventueel kun je bij het vastsolderen van het draad aan het koperen plaatje nog extra tin toevoegen. We streven naar een bergje tin waarin het uiteinde van het draad niet of amper zichtbaar is. Houd hiervoor de soldeerbout een tijdje op z’n plek, je zult zien dat het tin nog een paar seconden nodig heeft om helemaal uit te vloeien. Controleer als alle ESC’s vast zitten even of alle punten recht en goed vast zitten.

Stap 2 – Motoren monteren
Monteer de motoren op de uiteinden van de armen. Het is aan te raden de boutjes in te smeren met locktide (geen permanente!) om te zorgen dat ze er tijdens het vliegen niet uit trillen. Voor nu hoeft dat niet, de kans bestaat dat ze nog los moeten. Dirigeer de draden door een gat in de zijkant zodat ze eronder uit komen.

Stap 3 – Armen aan het frame monteren
Dan wordt het tijd om de armen aan het frame te bevestigen. We beginnen met de onderkant van het frame (de kant waar de ESC’s op vast gesoldeerd zitten). De bovenkant komt later pas, aangezien we er nog bij moeten kunnen. Voor elke arm heb je twee schroefjes nodig. Zorg dat de twee draden van de ESC’s door het poortje in de arm gaan. Op deze manier nemen ze later geen overbodige ruimte in. Die ruimte kunnen we namelijk goed gebruiken voor de LiPo accu en de ontvanger. De signaalkabeltjes van de ESC’s mogen ook door het poortje en vervolgens door het gat bovenin de arm. Daar komen ze uiteindelijk samen om aan te worden gesloten aan de Flight Controller.


Stap 4 – Motoren aan ESC’s solderen
Om weer wat overzicht te scheppen in de bedrading gaan we de motoren aan de ESC’s bevestigen. Volledig optioneel, maar wel raadzaam, is om de aansluiting van bullet-connectors te voorzien.
Als je besluit géén bullet connectors te gebruiken tussen de ESC en de motor, wacht dan tot alle andere componenten op hun plek zitten en sla deze (en de volgende) stap over. De oriëntatie van de kabels is namelijk belangrijk voor de richting waarin de motoren draaien. Met bullet connectors kan de draairichting van de motoren op elk moment eenvoudig worden gewijzigd.Soldeer de bullet connectors aan de kabels. Het is aan te raden een bullet connector eerst compleet te vullen met tin op de plek waar de bedrading moet komen. Je kunt hiervoor een tang gebruiken om de bullet connector stevig vast te houden. Als je een (haar)elastiekje om het handvat van de tang maakt heeft de tang genoeg grip op de connector. Het zorgt er ook voor dat je weer een hand vrij hebt, wat erg wenselijk is bij soldeerpraktijken (één voor het tin, de ander voor de soldeerbout). Als de bullet connector tot de rand gevuld is met vloeibaar tin kun je deze over de draad schuiven. Houd de soldeerbout nog een vijftal seconden op de connector om het tin goed rondom de draad te verdelen. Blaas even tegen de connector zodra de soldeerbout weggehaald wordt, dat versnelt het afkoelproces.Herhaal deze stap voor alle bedrading, dat zijn in totaal 12 female en 12 male connectors.Tip: controleer voor je tin in de connector stopt of de kabel goed in de connector past. Als het er dan al lastig in te schuiven is kun je de kabel beter iets kleiner maken. Met een tang en soldeerbout in je hand wordt het alleen maar lastiger om de connector om de kabel heen te krijgen.Sluit deze stap af met wat isolatietape of krimpkous om elke bullet connector (male én female). Op die manier kan er nooit kortsluiting optreden tussen de verschillende aansluitingen.

Stap 5 – Bevestig de ESC’s aan het de armen
Bevestig nu de ESC’s aan de armen met een tiewrap. Om te zorgen dat eventuele trillingen worden verminderd kun je er nog een stuk schuim (ongeveer 4cm dik) tussen zetten. Trek de tiewrap goed stevig aan zonder de ESC te beschadigen en knip vervolgens het uitstekende deel eraf. Zorg dat de bedrading van de ESC naar de motor niet strak staat indien je bullet connectors gebruikt. Je hebt dan meer kans dat deze los raken op momenten dat je dat niet kunt gebruiken.

Stap 6 – De accuverbinding
Knip eventuele aansluitingen van de connector, zodat je twee kabeltjes overhoudt met eenzelfde verbinding als op de LiPo accu zit. In mijn geval heb ik een 4mm banana connector gebruikt, maar inmiddels ben ik meer fan van de XT60 connector. Soldeer deze aansluitingskabel voor de accu aan het frame. Gebruik net als bij de ESC-frame verbinding veel tin. Laat de soldeerbout een tijdje op de kabel liggen zodat alle tin zich goed verdeelt. Controleer of de rode en zwarte kabels overeenkomen met die van de accu als de stekkers in elkaar zitten. Als dit niet zo is geen man over boord, zorg er dan wel voor dat de zwarte kabel op de + zit en de rode op de -. Als je het netjes wilt doen kun je de stekker omdraaien, dat kan een lastig karweitje worden.
Accu’s krijgen meestal een kabel van zo’n 12 cm aangemeten. Om te zorgen dat die niet teveel onder spanning staat is het raadzaam om voor de aansluitingskabel ook een lengte van zo’n 10 cm te kiezen.

Stap 7 – Bevestigen van de accu op het frame
Dit kan op verschillende manieren, maar zorg dat de accu er hoe dan ook te allen tijde weer uitgehaald kan worden. Plak de accu dus niet permanent vast met tape of lijm.
Mijn persoonlijke favoriet is velcro (klittenband). Gebruik dubbelzijdige foamtape om het velcro op de accu en de onderkant van het frame te plakken. Foamtape plakt erg goed, dempt trillingen en vangt eventuele oneffenheden in het oppervlak op. Kijk voordat je de accu beplakt eerst naar de kant van de aansluitingskabel (stap 6) en leg de bedrading van de accu ook aan die kant. Probeer een zo groot mogelijk oppervlak van de accu te bedekken, maar laat geen stukken velcro uitsteken. Houd er rekening mee dat het zwaartepunt van de accu in het midden zit voor een goede gewichtsverdeling. Dat kan op zijn beurt weer stroom schelen.
Stap 8 – Bevestigen van de Flight Controller
Plak met foamtape de flight controller op het bovenste frame-plaatje. Raadpleeg voor de exacte oriëntatie van de flight controller altijd de handleiding. In het geval van de hobbyking kk2.0 moeten de knoppen naar achteren wijzen. Ik heb ervoor gekozen de rode armen vooruit te laten gaan, volgens de X-layout. Je kunt ook de + layout kiezen, dan vormt één arm de voorkant. In dat geval moet de flight controller dus 45 graden gedraaid worden. Aan de achterkant van de flight controller steken hier en daar wat puntjes uit. Met de dubbelzijdige foamtape moet dat geen probleem zijn. Bevestig de controller zo exact mogelijk op het frame en druk hem even stevig aan.

Stap 9 – Bevestigen van de ontvanger
Net als de accu kan de ontvanger ook met velcro aan de bodemplaat worden bevestigd. Het is aan te raden om de servokabeltjes alvast in de ontvanger te steken en deze aan de andere kant van een klein labeltje te voorzien. Bij de ontvanger staat in de documentatie aangegeven welke channel welke eigenschap heeft (bijvoorbeeld “ELE” van elevator, of “THR” van throttle). Geef dit aan op de kabeltjes zodat ze straks meteen in de flight controller gestoken kunnen worden. Zet eventueel ook het channelnummer erop, zodat de kabeltjes ook eenvoudig in de ontvanger gestopt kunnen worden als deze er een keer uit moeten.
Omdat de kabeltjes al in de ontvanger zitten kun je alvast rekening houden met de extra ruimte die dat inneemt. Buig de kabeltjes over de ontvanger heen, door een gat in de topplaat van het frame. Plak de velcro op de plek waar de ontvanger komt.
Belangrijk: De antenne van de ontvanger kan het beste niet te dicht bij plekken komen waar veel stroom loopt i.v.m. interferentie.
Stap 10 – Bevestigen van de topplaat
Schroef nu de topplaat op het frame. Zorg dat alle kabeltjes (van de ESC’s en van de ontvanger) door de juiste gaten naar boven komen. Draai de schroeven stevig vast, maar overdrijf niet.
Plug vervolgens de servokabels in de flight controller aan de hand van de labels die je erop hebt geplakt en de documentatie van de flight controller.
Eindig met het bevestigen van de ESC’s aan de flight controller. Doe dit niet willekeurig, maar houd de motorlayout aan zoals aangegeven in de flight controller documentatie. In het geval van de hobbyking kk2.0 is de motorlayout zoals weergegeven in de afbeelding hieronder. De bovenste vier contactpunten aan de rechterkant zijn voor de eerste vier motoren.

Stap 11 – Opruimen
Knoop alle bedrading bij elkaar en gebruik kleine tiewraps om ze tot kleine bundels te knopen. Houd de verschillende soorten kabels liefst bij elkaar en bevestig die niet aan andere bedrading. Bij onderhoud hoeven dan niet alle tiewraps doorgeknipt te worden. Controleer of er niks is wat in de propellers kan komen. Als dat wel zo is, bind het dan nog dichter bij elkaar.
Eventueel kun je nog een plastic koepeltje monteren voor over de flight controller. Bij een crash wordt de flight controller zo beter beschermd. De koepeltjes worden verkocht in hobbywinkels als zelfbouw kerstballen en zijn via internet onder andere te vinden als je de term “hobby doorzichtig bal” gebruikt. Je kunt ook hierboven bij benodigdheden op de link klikken.
Tot slot
Een drone bouwen is dus niet zo moeilijk. De drone die je met deze handleiding hebt gebouwd is eenvoudig, modulair en goedkoop. Een crash betekent in het ergste geval dat je een aantal onderdelen moet vervangen. Je weet nu hoe. De grootste uitdaging zit ‘m in het afstellen van de flight controller. Er zijn gelukkig erg veel Youtube filmpjes te vinden waarin dit staat uitgelegd.
Omdat de opbouw van deze drone modulair is, kun je de drone gaandeweg upgraden met een andere motoren en ESC’s die efficiënter en krachtiger zijn. Je kunt de flight controller upgraden met een exemplaar die GPS heeft. Je kunt zelfs overwegen om een FPV set aan te schaffen. Of een gimbal toe te voegen. De mogelijkheden zijn eindeloos.
